分布式通信包 - torch.distributed
1. 支持的后端
torch.distributed 支持三个后端,每个后端具有不同的功能。下表显示哪些功能可用于CPU/CUDA张量。仅当用于构建PyTorch的实现支持时,MPI才支持CUDA。目前PyTorch分发版仅支持Linux。默认情况下,Gloo和NCCL后端构建并包含在PyTorch的分布之中(仅在使用CUDA构建时为NCCL)。MPI是一个可选的后端,只有从源代码构建PyTorch时才能包含它。(例如,在安装了MPI的主机上构建PyTorch)
| Backend | gloo |
gloo |
mpi |
mpi |
nccl |
nccl |
|---|---|---|---|---|---|---|
| Device | CPU | GPU | CPU | GPU | CPU | GPU |
| send | ✓ | ✘ | ✓ | ? | ✘ | ✓ |
| recv | ✓ | ✘ | ✓ | ? | ✘ | ✓ |
| broadcast | ✓ | ✓ | ✓ | ? | ✘ | ✓ |
| all_reduce | ✓ | ✓ | ✓ | ? | ✘ | ✓ |
| reduce | ✓ | ✘ | ✓ | ? | ✘ | ✓ |
| all_gather | ✓ | ✘ | ✓ | ? | ✘ | ✓ |
| gather | ✓ | ✘ | ✓ | ? | ✘ | ✓ |
| scatter | ✓ | ✘ | ✓ | ? | ✘ | ✘ |
| reduce_scatter | ✘ | ✘ | ✘ | ✘ | ✘ | ✓ |
| all_to_all | ✘ | ✘ | ✓ | ? | ✘ | ✓ |
| barrier | ✓ | ✘ | ✓ | ? | ✘ | ✓ |
2. 支持的分布式环境初始化方式
2.1 TCP初始化
有两种方法可以使用TCP进行初始化,这两种方法都需要从所有进程可以访问的网络地址和所需的world_size。第一种方法需要指定属于rank 0进程的地址。此初始化方法要求所有进程都具有手动指定的排名。
[!NOTE|style:flat] 请注意,最新的分布式软件包中不再支持多播地址。
group_name也被弃用了。
import torch.distributed as dist
# 使用其中一台机器的地址
dist.init_process_group(backend, init_method='tcp://10.1.1.20:23456',rank=args.rank, world_size=4)
2.2 共享文件系统初始化
另一种初始化方法使用一个文件系统,该文件系统与组中的所有机器共享和可见,以及所需的world_size。URL应以file://开头,并包含共享文件系统上不存在的文件(在现有目录中)的路径。如果文件不存在,文件系统初始化将自动创建该文件,但不会删除该文件。因此,下一步初始化 init_process_group() 在相同的文件路径发生之前您有责任确保清理文件。
[!NOTE|style:flat] 请注意,在最新的分布式软件包中不再支持自动排名分配,并且也不推荐使用
group_name。
警告
[!Warning|style:flat] 此方法假定文件系统支持使用
fcntl进行锁定 - 大多数本地系统和NFS都支持它。
此方法将始终创建该文件,并尽力在程序结束时清理并删除该文件。换句话说,每次进行初始化都需要创建一个全新的空文件,以便初始化成功。如果再次使用先前初始化使用的相同文件(不会被清除),则这是意外行为,并且经常会导致死锁和故障。因此,即使此方法将尽力清理文件,如果自动删除不成功,您有责任确保在训练结束时删除该文件以防止同一文件被删除 下次再次使用。如果你打算在相同的文件系统路径下多次调用 init_process_group() 的时候,就显得尤为重要了。换一种说法,如果那个文件没有被移除并且你再次调用 init_process_group(),那么失败是可想而知的。这里的经验法则是,每当调用init_process_group()的时候,确保文件不存在或为空。
import torch.distributed as dist
# 应始终指定等级
dist.init_process_group(backend, init_method='file:///mnt/nfs/sharedfile',world_size=4, rank=args.rank)
2.4 环境变量初始化
此方法将从环境变量中读取配置,从而可以完全自定义信息的获取方式。要设置的变量是:
MASTER_PORT - 需要; 必须是机器上的自由端口,等级为0。 MASTER_ADDR - 要求(0级除外); 等级0节点的地址。 WORLD_SIZE - 需要; 可以在这里设置,也可以在调用init函数时设置。 RANK - 需要; 可以在这里设置,也可以在调用init函数时设置。 等级为0的机器将用于设置所有连接。
这是默认方法,意味着不必指定init_method(或者可以是env://)。
3. torch.distributed.all_reduce工作过程
汇总记录不同 GPU 上生成的准确率、损失函数等指标信息。这个 API 就是 torch.distributed.all_reduce。示意图如下:
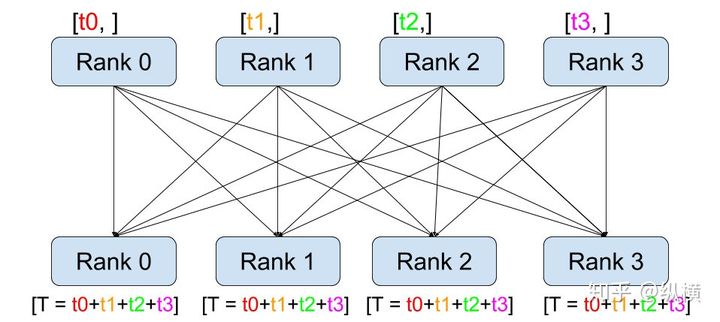
具体来说,它的工作过程包含以下三步:
- 通过调用
all_reduce(tensor, op=...),当前进程会向其他进程发送tensor(例如 rank 0 会发送 rank 0 的 tensor 到 rank 1、2、3) - 接受其他进程发来的
tensor(例如 rank 0 会接收 rank 1 的 tensor、rank 2 的 tensor、rank 3 的 tensor)。 - 在全部接收完成后,当前进程(例如rank 0)会对当前进程的和接收到的
tensor(例如 rank 0 的 tensor、rank 1 的 tensor、rank 2 的 tensor、rank 3 的 tensor)进行op(例如求和)操作。
使用 torch.distributed.all_reduce(loss, op=torch.distributed.reduce_op.SUM),我们就能够对不数据切片(不同 GPU 上的训练数据)的损失函数进行求和了。接着,我们只要再将其除以进程(GPU)数量 world_size就可以得到损失函数的平均值。
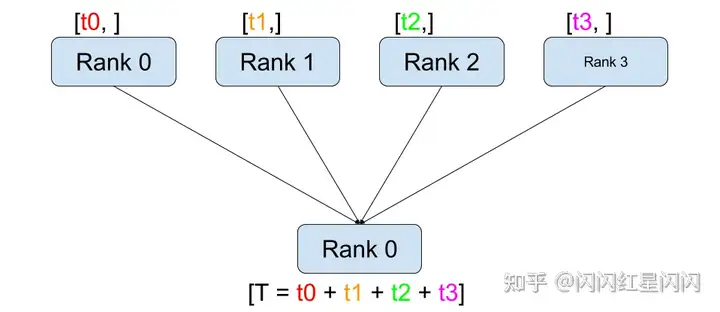
4. torch.distributed.reduce()工作过程
dist.reduce(tensor, dst, op, group):将 op 应用于每个 tensor 并将结果存储在 dst 中